Os robôs humanóides de hoje parecem notáveis – mas há uma falha de design que os impede

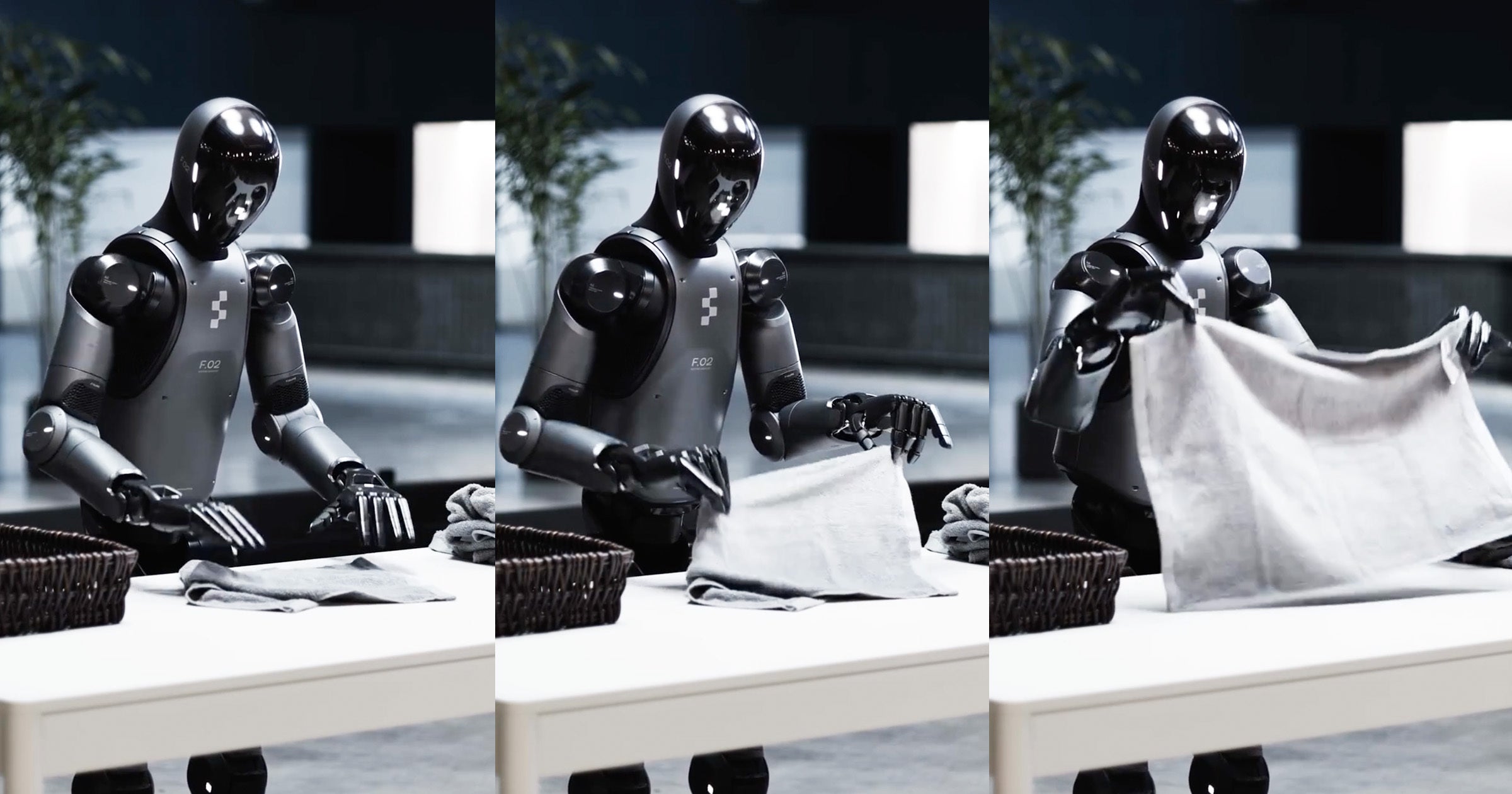
Assista ao Atlas Robot da Boston Dynamics fazendo rotinas de treinamento, ou os mais recentes humanóides da figura carregando uma máquina de lavar, e é fácil acreditar que a revolução do robô está aqui. Do lado de fora, parece que o único desafio restante é aperfeiçoar o software IA (inteligência artificial) para permitir que essas máquinas lidem com ambientes da vida real. Mas os maiores players do setor sabem que há um problema mais profundo. Em um pedido recente de parcerias de pesquisa, a Divisão de Robótica da Sony destacou uma questão central que impedia suas próprias máquinas. Observou que os robôs humanóides e imitadores de animais de hoje têm um “número limitado de articulações”, que cria uma “disparidade entre seus movimentos e os dos sujeitos que imitam, diminuindo significativamente seu … valor”. A Sony está pedindo novos “mecanismos estruturais flexíveis” – em essência, corpos físicos mais inteligentes – para criar o movimento dinâmico que está ausente atualmente. A questão principal é que os robôs humanóides tendem a ser projetados em torno de software que controla tudo centralmente. Essa abordagem “primeiro do cérebro” resulta em máquinas fisicamente não naturais. Um atleta se move com graça e eficiência, porque seu corpo é uma sinfonia de articulações compatíveis, espinhos flexíveis e tendões semelhantes à mola. Um robô humanóide, por outro lado, é uma montagem rígida de metal e motores, conectada por articulações com graus de liberdade limitados. Como resultado, mesmo os humanóides mais avançados só podem funcionar por algumas horas antes que suas baterias se esgotem. Para colocar isso em perspectiva, o Robot Optimus da Tesla consome cerca de 500 watts de poder por segundo para uma simples caminhada. Um humano realiza uma caminhada rápida mais exigente usando apenas 310 watts por segundo. O robô está, portanto, queimando quase 45 % mais energia para realizar uma tarefa mais simples, que é uma ineficiência considerável. Diminação de retornos, isso significa que todo o setor está no caminho errado? Quando se trata de sua abordagem central, sim. Corpos não naturais exigem um cérebro de supercomputador e um exército de atuadores poderosos, que por sua vez tornam os robôs mais pesados e sedentos de energia, aprofundando o próprio problema que pretendem resolver. O progresso da IA pode ser de tirar o fôlego, mas leva a retornos decrescentes. O Optimus de Tesla, por exemplo, é inteligente o suficiente para dobrar uma camiseta. No entanto, a demonstração realmente revela sua fraqueza física. Um humano pode dobrar uma camiseta sem realmente olhar, usando seu senso de toque para sentir o tecido e guiar seus movimentos. Provavelmente seria derrotado por uma camisa amassada em uma cama bagunçada, porque seu corpo não possui a inteligência física para se adaptar ao estado imprevisível do mundo real. O novo atlas totalmente elétrico da Boston Dynamics é ainda mais impressionante, com uma amplitude de movimento que parece quase alienígena. Mas o que os vídeos de acrobacias virais não mostram é o que não pode fazer. Não conseguiu caminhar com confiança em uma rocha musgosa, por exemplo, porque seus pés não conseguem sentir a superfície para se conformar. Não conseguiu passar por um denso matagal de galhos, porque seu corpo não pode ceder e depois voltar. É por isso que, apesar de anos de desenvolvimento, esses robôs permanecem principalmente plataformas de pesquisa, não produtos comerciais. Por que os líderes da indústria já não estão buscando essa filosofia diferente? Uma razão provável é que as principais empresas de robótica de hoje são empresas fundamentalmente de software e IA, cuja experiência está na solução de problemas com a computação. Sua cadeia de suprimentos global é otimizada para apoiar isso com motores, sensores e processadores de alta precisão. A construção de corpos de robôs fisicamente inteligentes requer um ecossistema de fabricação diferente, enraizado em materiais e biomecânicos avançados, que ainda não são maduros o suficiente para operar em escala. Quando o hardware de um robô já parece tão impressionante, é tentador acreditar que a próxima atualização do software resolverá qualquer problema restante, em vez de realizar a tarefa dispendiosa e difícil de redesenhar o corpo e a cadeia de suprimentos necessária para construir. Deriva da observação de que a natureza aperfeiçoou corpos inteligentes milhões de anos atrás. Estes foram baseados em um princípio conhecido como computação morfológica, o que significa que os corpos podem executar cálculos complexos automaticamente. Uma escala de pinheiro aberta em condições secas para liberar sementes e fechar quando estiver úmido para protegê -los. Esta é uma resposta puramente mecânica à umidade, sem cérebro ou motor envolvido. Eles absorvem passivamente o choque quando o pé atinge o solo, apenas para liberar a energia para tornar sua marcha estável e eficiente, sem exigir tanto esforço dos músculos. Pense sobre a mão humana. Sua carne macia tem a inteligência passiva de se conformar automaticamente a qualquer objeto que ele possua. Nossas pontas dos dedos atuam como um lubrificador inteligente, ajustando a umidade para atingir o nível perfeito de atrito para qualquer superfície. Se esses dois recursos foram incorporados em uma mão Optimus, seria capaz de manter objetos com uma fração da força e energia atualmente necessária. A própria pele se tornaria o computador. MI tem tudo a ver com a estrutura física de uma máquina para obter uma adaptação automática passiva – a capacidade de responder ao meio ambiente sem precisar de sensores ou processadores ativos ou energia extra. A solução para a armadilha humanóide não é abandonar formas ambiciosas de hoje, mas para construí -las de acordo com essa filosofia diferente. Quando o corpo de um robô é fisicamente inteligente, seu cérebro de IA pode se concentrar no que faz melhor: estratégia de alto nível, aprender e interagir com o mundo de uma maneira mais significativa. Os pesquisadores já estão provando o valor dessa abordagem. Por exemplo, robôs projetados com pernas parecidas com a mola que imitam os tendões de armazenamento de energia de um guepardia podem correr com uma notável eficiência. Meu próprio grupo de pesquisa está desenvolvendo dobradiças híbridas, entre outras coisas. Eles combinam a precisão e a força de uma articulação rígida com as propriedades adaptativas de absorção de choque de uma compatível. Para um robô humanóide, isso pode significar criar um ombro ou joelho que se move mais parecido com um humano, desbloqueando vários graus de liberdade para alcançar um movimento complexo e realista. O futuro da robótica está em uma batalha entre hardware e software, mas em sua síntese. Ao abraçar o MI, podemos criar uma nova geração de máquinas que podem finalmente sair do laboratório com confiança e no nosso mundo. Este artigo é republicado da conversa sob uma licença Creative Commons. Leia o artigo original.
Fonte










Publicar comentário